[0001]
本发明涉及包装设备技术
领域,特别是一种湿巾自动装箱装置。
背景技术:
[0002]
随着新冠
疫情的爆发,消毒湿巾成为人们必备的日常用品,其采用软
塑料包装纸,体积小便于携带,尤其是部分包装上方增加硬质塑料卡扣,每次抽取后可反复密封湿巾,使湿巾内有效成分不会挥发或溢出,使用方便、安全。
[0003]
但针对该产品的包装装箱,却比普通包装的湿巾更为复杂,由于其正面带有凸起硬质卡扣,夹取或吸附移动装箱过程中生产事故率更高,且夹取或吸附后需再次移入包装箱内,需要额外增加一个工位,现有产线并不能完全满足该湿巾的生产需求。
[0004]
中国
专利其公开号cn108128491a提供了一种
板材的自动抓取装箱装置,采用了传送带、导轨、直线
轴承和升降气缸等部件,公布了板材的移动和自动装箱过程,但依然需要排列、抓取、装箱多步骤作业,且未公开板材正反表面不同的情况如何更高效装箱的方法;中国专利其公开号cn111572864a提供了一种e片自动抓取装箱装置,具备滑料槽、接料箱正反移动装置和自动传输抓取装置等,也未公开针对正反面不同的产品如何实现更优抓取装箱方法。为此,亟需一种更便捷的适用于湿巾等质量大,表面不平整产品的抓取装箱装置。
技术实现要素:
[0005]
鉴于现有技术中存在的缺陷和不足,本发明提供了一种新型湿巾自动装箱装置。
[0006]
为了解决上述技术问题,本发明的
技术方案是:一种湿巾自动装箱装置,包括第一
输送带、第二输送带和湿巾,其特征在于:还包括旋转推板、挡板、活动辊、弯折部、转轮轴、包装箱和控制装置;所述转轮轴设置于第一输送带后方,转轮轴中心与第一输送带中心位于同一水平面上,所述转轮轴上设置旋转推板,所述旋转推板上设置挡板,挡板由并列排布的活动辊和末端的弯折部组成;所述转轮轴到第一输送带的距离略大于转轮轴到弯折部末端的直线距离。
[0007]
进一步地,所述控制装置连接
机械臂,所述机械臂底端设置卡爪,所述卡爪包括卡爪内壁和卡爪外壁。
[0008]
进一步地,所述包装箱至少在一侧箱体上设置提拉口,所述提拉口宽度大于卡爪内壁和卡爪外壁之间的厚度。
[0009]
进一步地,所述卡爪外壁最底端到机械臂中心轴的距离小于卡爪内壁最底端到机械臂中心轴的距离。
[0010]
进一步地,所述控制装置连接连杆,所述连杆底端设置吸盘。
[0011]
进一步地,所述吸盘数量和分布为两排两列共计4个。
[0012]
进一步地,所述弯折部与挡板的角度为120度至150度。
[0013]
进一步地,所述挡板上设置活动辊的数量为4-8个。
[0014]
进一步地,所述旋转推板上设置挡板的数量为6-10个。
[0015]
进一步地,所述第二输送带输送方向可调节,可为顺时针输送或逆时针输送。
[0016]
与现有技术相比,本发明的有益效果如下:
[0017]
1、本发明结构简单,使用方便,节省了将湿巾码垛再装箱的工序,采取旋转推板装置,将湿巾依次翻转方向,使用机械臂控制包装箱位置和角度,使湿巾准确落入包装箱并依次排列整齐;
[0018]
2、本发明采取的旋转推板装置还可将包装上方有凹凸不平卡扣的湿巾翻转180度,传送至第二输送带上,使湿巾背面朝上,便于使用传统吸附抓取的方式装箱。
附图说明
[0019]
下面结合附图对本发明作进一步的说明。
[0020]
图1为本发明实施例一的结构
示意图;
[0021]
图2为本发明旋转推板的结构示意图;
[0022]
图3为本发明旋转推板的轴侧图;
[0023]
图4为本图1标记a部分放大示意图;
[0024]
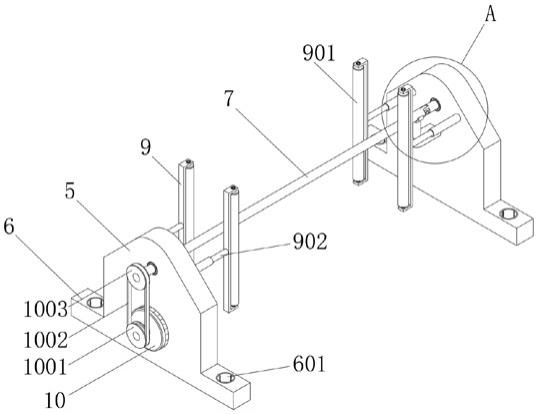
图5为本发明实施例二的结构示意图。
[0025]
图中:1第一输送带、2第二输送带、3旋转推板、301挡板、302活动辊、303弯折部、4转轮轴、5湿巾、6包装箱、7机械臂、701卡爪、702卡爪内壁、703卡爪外壁、8控制装置、9连杆、10吸盘。
具体实施方式
[0026]
为使本发明的技术方案和有益效果更加清楚,下面结合实施例对本发明进行进一步的详细说明。
[0027]
实施例1:
[0028]
如图1-4所示,本发明一种湿巾自动装箱装置,包括第一输送带1、第二输送带2、旋转推板3、挡板301、活动辊302、弯折部303、转轮轴4、湿巾5、包装箱6、机械臂7和控制装置8;所述转轮轴4设置于第一输送带1后方,转轮轴4中心与第一输送带1中心位于同一水平面上,所述转轮轴4上设置旋转推板3,当湿巾5在第一输送带1向前输送时,同时转轮轴4带动旋转推板3转动,所述旋转推板3上设置挡板301,所述旋转推板3上设置挡板301的数量为6-10个,根据湿巾5包装大小和流水线节奏可以选择安装不同的挡板301数量;挡板301由并列排布的活动辊302和末端的弯折部303组成;每个挡板301上设置的活动辊302的数量为4-8个,所述活动辊302均可绕其中心轴自由转动,所述弯折部303与挡板301的角度为120度至150度,所述转轮轴4到第一输送带1的距离略大于转轮轴4到弯折部303末端的直线距离。按照湿巾5传送节奏设置转轮轴4的转速,转轮轴4与第一输送带1同向转动,当湿巾5输送到第一输送带1末端时,挡板301刚好承接落下的湿巾5,弯折部303可保证湿巾5不易掉落,湿巾5由于惯性沿活动辊302被稳妥的放置于挡板301上。
[0029]
所述控制装置8连接机械臂7,设置于旋转推板3后方、第二输送带2上方;所述机械臂7底端设置卡爪701,所述卡爪701包括卡爪内壁702和卡爪外壁703。所述包装箱6至少在一侧箱体上设置提拉口601,所述提拉口601宽度大于卡爪内壁702和卡爪外壁703之间的厚度,所述卡爪外壁703最底端到机械臂7中心轴的距离小于卡爪内壁702最底端到机械臂7中
心轴的距离,该结构可保证卡爪向下移动顺利退出提拉口601。
[0030]
随着旋转推板3的转动,湿巾5将被翻转下落,第二输送带2起包装箱6运输功能,与第一输送带1传送方向相反;控制装置8控制卡爪701挂于提拉口601上,提起包装箱6呈一定倾斜度,卡爪701水平方向移动速度与第二输送带2相同,包装箱被提起时,由旋转推板3下落的湿巾5刚好落入箱体内,且由于包装箱倾斜,湿巾5可紧靠在箱体内壁上自动依次排列,当包装箱装满时,卡爪701向下将包装箱平放于第二输送带2上,此时机械臂7停止水平移动,向下将卡爪701退出提拉口601,最后复位,操控下一个包装箱,实现循环自动装箱。
[0031]
实施例2:
[0032]
如图5所示,所述第一输送带1和旋转推板3的运行与实施例1相同,将第二输送带2的输送方向设置为与第一输送带1相同,位于旋转推板3后方和第二输送带2上方的控制装置8连接连杆9,所述连杆9底端设置吸盘10。当湿巾5被旋转推板3翻落时,可将湿巾5翻转180落至第二输送带2继续向前传送,此时湿巾5较为平整的背面向上,控制装置8操控连杆9的位置,使其底端吸盘10依次吸附每件产品,便于后续装箱工序;所述吸盘10数量和分布为两排两列共计4个,可进一步增强对软性塑料包装的抓取力。
[0033]
本发明的工作原理:湿巾5由第一输送带1输送至旋转推板3的挡板301上,随着转轮轴4的转动,湿巾5被翻转落下,此时位于旋转推板3后方的控制装置8操控机械臂7,使其底端卡爪701挂于提拉口601上,提起包装箱6呈一定倾斜度在第二输送带2上传送至旋转推板3下方,落下的湿巾5落入包装箱6,由于包装箱6倾斜,湿巾5可贴紧内壁依次排列整齐,随后卡爪701退出提拉口601复位,循环以上流程;若采用传统吸附抓取装箱方法,则使旋转推板3翻落下的湿巾5直接落在第二输送带2上即可,此时湿巾5被翻转180度,较为平整没有卡扣的背面朝上,由下一工位的吸盘吸附抓取,最后增加一个装箱步骤即可。
如果您还有其他的疑问和需求,请点击【立即咨询】或者是添加微信号 【13608176338】 和我们鱼爪商标网客服取得联系,为你排忧解难! 此文章来源于网络,如有侵权,请联系删除
和我们鱼爪商标网客服取得联系,为你排忧解难! 此文章来源于网络,如有侵权,请联系删除
此文章来源于网络,如有侵权,请联系删除