一种无人飞行器用冗余舵机系统的制作方法
一种无人飞行器用冗余舵机系统[0001]技术领域:[0002]本实用新型涉及一种无人飞行器用冗余舵机系统。[0003]背景技术::[0004]目前无人飞行器上的舵机是单独使用的
2021-02-24查看详情>>

本实用新型涉及一种飞行器,具体是一种倾转旋翼飞行器平尾及平尾倾转机构。
背景技术:
随着航空技术的发展,无人飞行器在军用及民用领域得到了广泛的应用,各类飞行器中旋翼飞行器因其优良的起飞着落性能和悬停性能得到了快速的发展,尤其是倾转旋翼机结合了固定翼飞行器和旋翼飞行器的优点,具有良好的运用前景。
目前市面上一些的飞行器多为固定翼机飞行器和旋翼机飞行器,固定翼机飞行器和旋翼机飞行器在前飞时因倾转翼倾转角度不足,导致速度慢、效率低,而且目前一些固定翼机飞行器和旋翼机飞行器内部连接件结构复杂不易拆装,从而影响了它的进一步发展。
技术实现要素:
本实用新型的目的在于提供一种倾转旋翼飞行器平尾及平尾倾转机构,以解决上述背景技术中提出的问题。
为实现上述目的,本实用新型提供如下技术方案:
一种倾转旋翼飞行器平尾及平尾倾转机构,包括倾转舵机,所述倾转舵机正面的输出轴上固定套接有舵机摇臂,舵机摇臂远离倾转舵机输出轴的一端转动连接有连杆,连杆远离舵机摇臂的一端转动连接有倾转摇臂,倾转摇臂的右侧设置有平尾主梁,平尾主梁的表面设置有平尾翼肋,平尾翼肋的数量为若干个,两个间距最短的平尾翼肋之间固定连接有升降舵舵机,平尾翼肋的平尾主梁的一侧设置有升降舵,升降舵舵机的输出轴固定连接在升降舵一侧,平尾主梁的表面靠近倾转摇臂的位置处固定连接有倾转铰链。
作为本实用新型进一步的方案:所述升降舵舵机的数量为两个,两个升降舵舵机以倾转摇臂的轴线为轴呈轴对称分布。
作为本实用新型进一步的方案:所述舵机摇臂、连杆、倾转摇臂和倾转铰链构成的形状为平行四边形。
作为本实用新型再进一步的方案:所述升降舵的数量为两个,两个升降舵通过铰链与平尾主梁远离倾转摇臂的一侧转动连接。
与现有技术相比,本实用新型的有益效果是:通过设置舵机摇臂、连杆、倾转摇臂和升降舵,摇臂舵机摇臂在舵机的驱动下逆时针旋转90度,能够实现飞行器从向前平飞模态转垂直飞行模态,通过两个升降舵舵机分别控制升降舵的上下偏转,实现飞行器的俯仰控制,倾转旋翼结构结合了固定翼飞行器和旋翼飞行器的优点,达到了结构简单,倾转可靠、拆装便捷的效果,解决了因倾转翼倾转角度不足,导致速度慢、效率低,且固定翼机飞行器和旋翼机飞行器内部连接件结构复杂不易拆装的问题。
附图说明
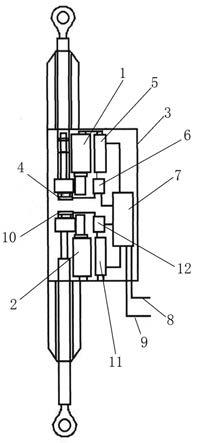
图1为一种倾转旋翼飞行器平尾及平尾倾转机构的平飞状态下平尾及平尾倾转机构的轴测图。
图2为一种倾转旋翼飞行器平尾及平尾倾转机构的垂直状态下平尾及平尾倾转机构的轴测图。
如图所示:1.倾转舵机,2.舵机摇臂,3.连杆,4.平尾主梁,5.升降舵,6.倾转摇臂,7.倾转铰链,8.升降舵舵机,9.平尾翼肋。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
在本实用新型的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“顶/底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“套设/接”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
请参阅图1~2,本实用新型实施例中,一种倾转旋翼飞行器平尾及平尾倾转机构,包括倾转舵机1,所述倾转舵机1正面的输出轴上固定套接有舵机摇臂2,舵机摇臂2、连杆3、倾转摇臂6和倾转铰链7构成的形状为平行四边形,通过平行四边形的设置可以有效的带动倾转摇臂6进行转动,达到了舵机摇臂2和倾转摇臂6转动角度相同的目的,且更加的稳定牢固,舵机摇臂2远离倾转舵机1输出轴的一端转动连接有连杆3,连杆3远离舵机摇臂2的一端转动连接有倾转摇臂6,倾转摇臂6的右侧设置有平尾主梁4,对整个倾转翼进行支撑,平尾主梁4的表面设置有平尾翼肋9,平尾翼肋9的数量为若干个,两个间距最短的平尾翼肋9之间固定连接有升降舵舵机8,升降舵舵机8的数量为两个,两个升降舵舵机8以倾转摇臂6的轴线为轴呈轴对称分布,对称分布使倾转翼两边的重量相等,在飞行时不易发生倾斜,受力均衡,平尾翼肋9的平尾主梁4的一侧设置有升降舵5,升降舵5的数量为两个,两个升降舵5通过铰链与平尾主梁4远离倾转摇臂6的一侧转动连接,两个升降舵5方便对倾转翼进行控制,升降舵舵机8的输出轴固定连接在升降舵5一侧,平尾主梁4的表面靠近倾转摇臂6的位置处固定连接有倾转铰链7。
在使用时,把倾转舵机1和倾转铰链7固定安装在飞行器的机身上,倾转铰链7另一半固定在飞行器的翼梁上,连杆3连接着舵机摇臂2和倾转摇臂6,使舵机摇臂2、连杆3、倾转摇臂6及倾转铰链7之间形成一个平行四边形结构,通过倾转舵机1带动舵机摇臂2逆时针旋转90度,舵机摇臂2逆时针旋转90度带动连杆3转动,连杆3逆时针旋转90度,实现平尾从水平状态到垂直状态的角度倾转,即飞行器从向前平飞模态转垂直飞行模态,再通过两个升降舵舵机8分别控制对升降舵5的上下偏转,实现飞行器的俯仰控制,该设计结构简单、易操作,且通过倾转铰链7进行连接固定,拆装更为方便。
尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内,且本说明书中未作详细描述的内容均属于本领域专业技术人员公知的现有技术。
如果您还有其他的疑问和需求,请点击【立即咨询】或者是添加微信号 【13608176338】 和我们鱼爪商标网客服取得联系,为你排忧解难! 此文章来源于网络,如有侵权,请联系删除
和我们鱼爪商标网客服取得联系,为你排忧解难! 此文章来源于网络,如有侵权,请联系删除
此文章来源于网络,如有侵权,请联系删除
一种无人飞行器用冗余舵机系统[0001]技术领域:[0002]本实用新型涉及一种无人飞行器用冗余舵机系统。[0003]背景技术::[0004]目前无人飞行器上的舵机是单独使用的
2021-02-24查看详情>>

[0001]本发明主要涉及飞行设备技术领域,特指一种直升机液压舵机试验器及试验方法。背景技术:[0002]舵机yd4是一个四通道分离式电液舵机。四个主通道接收来自自动驾驶系统的
2021-02-24查看详情>>
本发明涉及飞行器技术领域,尤其涉及一种舵机与舵面的连接装置。背景技术:飞行器的舵机和舵面需通过连接装置相连,以使舵机旋转输出轴带动舵面旋转。目前常用的舵机与舵面连接装置虽然结构
2021-02-24查看详情>>









