一种无人飞行器用冗余舵机系统的制作方法
一种无人飞行器用冗余舵机系统[0001]技术领域:[0002]本实用新型涉及一种无人飞行器用冗余舵机系统。[0003]背景技术::[0004]目前无人飞行器上的舵机是单独使用的
2021-02-24查看详情>>

技术领域:
本实用新型涉及一种无人直升机的倾斜盘控制机构。
背景技术:
:
目前无人直升机的倾斜盘是通过摇臂舵机和复杂的推拉杆机构控制的,其不足之处在于线性精度不够,需要软件进行补偿,结构复杂,轴点多,损耗大,易发生故障,而且重量大。
技术实现要素:
:
本实用新型所要解决的技术问题是提供一种结构简单,线性精度高的无人直升机的倾斜盘控制机构。
上述目的是这样实现的:它包括支撑架,支撑架固定在倾斜盘下方的主轴外管上,若干个直线舵机的下端分别通过关节轴承连接在支撑架上,直线舵机的上端通过关节轴承连接在倾斜盘的静盘上,其中一个直线舵机的推杆通过关节轴承与倾斜盘上的静盘限位器连接。
主轴位于主轴套管内,静盘套在主轴外面与主轴滑动接触,动盘通过变距小拉杆与变距摇臂连接,变距摇臂的内端与桨夹固定,桨夹与旋翼的后端通过桨夹螺栓相连,旋翼的后端还通过关节轴承与柔性限摆器相连,柔性限摆器的前端通过关节轴承与变距摇臂内端连接。桨夹内端都通过销轴连接在中间连接器上,中间连接器通过螺栓连接在主轴的顶部,同步器的下端通过关节轴承与动盘连接,同步器的上端与主轴通过销轴连接。
本实用新型的优点是:通过直线舵机控制倾斜盘可提高线性精度,并且结构简单,损耗小,检修方便。
附图说明:
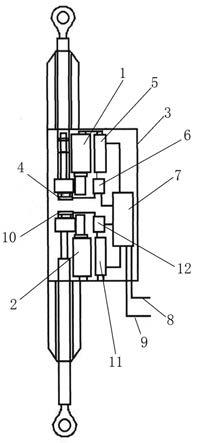
图1是本实用新型的结构示意图。
具体实施方式:
下面结合图1对本实用新型做进一步描述;
它包括支撑架1,支撑架固定在倾斜盘3下方的主轴外管2上,若干个直线舵机4的下端分别通过关节轴承连接在支撑架上,直线舵机的上端通过关节轴承连接在倾斜盘的静盘上,其中一个直线舵机的推杆通过关节轴承与倾斜盘上的静盘限位器5连接。
主轴6位于主轴套管内,静盘套在主轴外面与主轴滑动接触,动盘通过变距小拉杆7与变距摇臂8连接,变距摇臂的内端与桨夹9固定,桨夹与旋翼10的后端通过桨夹螺栓相连,旋翼的后端还通过关节轴承与柔性限摆器11相连,柔性限摆器的前端通过关节轴承与变距摇臂内端连接。桨夹内端都通过销轴连接在中间连接器12上,中间连接器通过螺栓连接在主轴的顶部,同步器13的下端通过关节轴承与动盘连接,同步器的上端与主轴通过销轴连接。
以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
如果您还有其他的疑问和需求,请点击【立即咨询】或者是添加微信号 【13608176338】 和我们鱼爪商标网客服取得联系,为你排忧解难! 此文章来源于网络,如有侵权,请联系删除
和我们鱼爪商标网客服取得联系,为你排忧解难! 此文章来源于网络,如有侵权,请联系删除
此文章来源于网络,如有侵权,请联系删除
一种无人飞行器用冗余舵机系统[0001]技术领域:[0002]本实用新型涉及一种无人飞行器用冗余舵机系统。[0003]背景技术::[0004]目前无人飞行器上的舵机是单独使用的
2021-02-24查看详情>>

[0001]本发明主要涉及飞行设备技术领域,特指一种直升机液压舵机试验器及试验方法。背景技术:[0002]舵机yd4是一个四通道分离式电液舵机。四个主通道接收来自自动驾驶系统的
2021-02-24查看详情>>
本发明涉及飞行器技术领域,尤其涉及一种舵机与舵面的连接装置。背景技术:飞行器的舵机和舵面需通过连接装置相连,以使舵机旋转输出轴带动舵面旋转。目前常用的舵机与舵面连接装置虽然结构
2021-02-24查看详情>>









